Detecting and Tracking Dynamic Objects Using RGB-D and Computer Vision Applied to Probabilistic Robotics
Klaas Krutein, Ruchit Patel, Tina Li
Professor Ashis Banerjee, University of Washington
September 2018 –December 2018
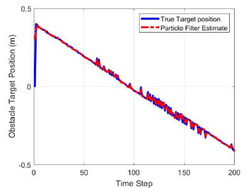
The idea behind this project is to simulate a robot that is able to track the movements of multiple dynamic objects in an environment that comprises of dynamic and static objects. It can be assumed that this environment is not necessarily of linear nature but is an indoor environment without any weather influences and solid, level ground. It is furthermore assumed that there are no objects entering and leaving the simulated space and that all objects are constantly present. Thus, the robot’s environment is stable and does not comprise unforeseen dynamics. The core part of this problem is the integration and usage of techniques that are able to identify individual dynamic objects and estimate their state (i.e. their relative position to the robot). Hence, particular emphasis is given to the measurement model of the robot. The goal is to explore techniques that can efficiently solve this problem and contribute to the knowledge development and the skillset of the authors. A particle filter was implemented to estimate the state of dynamic objects in terms of relative distance and speed with an average accuracy of 95%.
Final paper available upon request.
Responsibilities: Simulate a static mobile indoor robot to detect and track static and dynamic objects; research which filter, measurement model, and sensors should be used; assist in implementing particle filter and measurement model
Skills/Software: V-REP, MATLAB
Challenges:
Implementation of particle filter
Watched videos and looked at sample particle filter codes, and read research papers on how people implemented the filter
Development of a measurement model–calculating measurement errors and finding the covariance matrix
Looked at papers calibrating the Kinect sensor as the Kinect is popular and well-tested
Covariance matrix is arbitrary in our case and we wanted to find the best values for state estimation
Used a trial-and-error calibration approach
Multiple tracking of dynamic objects using black markers as signatures for computer vision.
 |  |
|---|